Habitat Researchers Test Subsea-positioning Technology
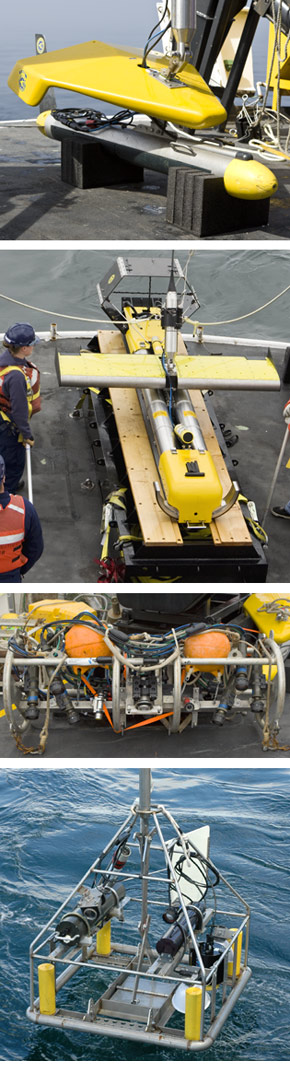
Figure 10. Towed scientific and hydrographic instruments that require subsea positioning capability (top to bottom): Klein 5410 side scan sonar, Klein 7180 long-range side scan sonar, SEABOSS sediment grab/camera system, and the two-part TACOS video sled. SEABOSS was not included in this exercise because of acceptable performance during the 2009 FISHPAC-project cruise in the EBS.
The Magnuson-Stevens Fishery Conservation and Management Act requires the National Marine Fisheries Service (NMFS) to characterize and map essential fish habitat and to protect these areas from adverse impacts due to fishing and other activities. Since 2006, scientists with the RACE Habitat Research Group (HRG) have been working collaboratively with NOAA's Office of Coast Survey (OCS), Office of Marine and Aviation Operations (OMAO), and the NOAA ship Fairweather to integrate the nautical-charting and habitat-mapping activities of these organizations in the eastern Bering Sea (EBS).
This work involves a variety of towed instruments, including two different side scan sonar systems (Klein 5410, Klein 7180 LRSSS), a towed camera system (TACOS), and an over-the-side grab sampler (SEABOSS). In all cases, a subsurface tracking system is required to provide accurate positioning of the overboard system and the resulting data.
To this end, an ultra-short baseline (USBL) system calculates the subsurface position of an object by combining acoustic range and bearing data from a vessel-mounted transceiver with attitude, heading and location information from the vessel's own navigation system. The object to be tracked needs to be equipped with an acoustic transponder or responder that communicates with the transceiver attached to the vessel. This technology does not require a transponder array to be deployed on the seabed before positioning can commence and is thus ideal for trackline work.
The AFSC purchased a wideband-enabled Sonardyne Fusion USBL system for the Fairweather in 2004 in order to provide capability for subsurface positioning of scientific and hydrographic instruments. In 2006, an over-the-side pole was fabricated for the transceiver using a proven AFSC design and was successfully used during extended at-sea operations in the EBS. This same pole catastrophically failed shortly after deployment in 2008.
The USBL transceiver was subsequently installed in a vacant area of the ship's skeg during the Fairweathers 2008-09 winter-repair period. However, performance problems associated with acoustic interference and multipath conditions were identified during sea trials in Puget Sound on 23 April 2009. The transceiver's proximity to the ship's hull and propellers was identified as the most likely cause for these problems.
In order to better define the performance characteristics of this installation, systematic tests were undertaken during 29-30 June 2010 in the Freshwater Bay region of the Strait of Juan de Fuca, Washington (depths 120-150 m). In particular, various subsea-positioning scenarios were investigated using two different side scan sonar systems and a towed video system (Fig. 10).
For each of the three towed instruments, specific combinations of speed over ground and bearing from the vessel trackline were tested. Prior to testing, a reconnaissance survey was conducted with the ship's Reson 7111 multibeam echosounder to identify potential hazards in the study area. A dynamic calibration of the USBL system was subsequently completed to determine system offsets and provide accurate positioning capability. The USBL performance while towing the side scan sonar systems was measured on a fixed X-shaped maneuvering pattern where the test conditions for each pass varied according to the predetermined plan for each instrument. A complete circuit of the "X" and the two accompanying turns was completed at each test speed. The maneuvering pattern was continuously navigated with a particular towfish until testing with that system was completed. The USBL performance while towing TACOS was measured in the same maneuvering area but did not include turns because of reduced steerage at the minimal headway required for this system.
Three methods were used to evaluate USBL signal quality and overall system performance using the data collected. This involved quality flags stored in the USBL-system software and analysis of post-processed positions of the towed instruments.
In general, our results demonstrated inconsistent and, therefore, unreliable performance from a system that did not calibrate according to manufacturer's standards. Instrument-specific effects on positioning that are related to tow speed and layback angle were observed and represent deficiencies that limit certain multi-mission research and hydrographic surveying operations from the platform.
Our HRG scientists will work closely with OMAO engineers during the Fairweather's 2010-11 winter in-port to resolve the performance problems as part of preparation for the multi-mission FISHPAC-project cruise in the eastern Bering Sea scheduled for summer 2011. Although primarily a scientific study concerned with EFH characterization, the FISHPAC project will also provide hydrographic-quality bathymetric data to the NOAA Pacific Hydrographic Branch for updating nautical charts in areas with outdated or nonexistent information.